注意:此页面搜索的是所有试题
西南石油大学土木工程施工与组织(专升本)
单选36 滚动轴承的额定寿命是指____。
·在额定动载荷作用下,轴承所能达到的寿命
·在额定工况和额定动载荷作用下,轴承所能达到的寿命
·在额定工况及额定动载荷作用下,90%轴承所能达到的寿命
·同一批轴承进行试验中,90%轴承所能达到的寿命
单选37 联轴器和离合器的主要作用是_____。
·联接两轴,使其一同旋转并传递转矩
·补偿两轴的综合位移
·防止机器发生过载
·缓和冲击和震动
单选38对于工作中载荷平稳,不发生相对位移,转速稳定且对中性好的两轴宜选用____联轴器。
·刚性凸缘
·滑块
·弹性套柱销
·齿轮
单选39 对于轴向径向位移较大,转速较低,无冲击的两轴间宜选用_____联轴器。
·弹性套柱销
·万向
·滑块
·径向簧片
单选40 轴环的用途是___。
·作为轴加工时的定位面
·提高轴的强度
·提高轴的刚度
·使轴上的零件获得轴向定位
某单位反馈系统的开环传递函数为: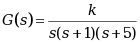 ,当k=( )时,闭环系统临界稳定。
,当k=( )时,闭环系统临界稳定。
·10
·20
·30
·40
设系统的特征方程为 ,则此系统中包含正实部特征的个数有( )
,则此系统中包含正实部特征的个数有( )
·0
·1
·2
·3
单位反馈系统开环传递函数为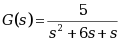 ,当输入为单位阶跃时,则其位置误差为( )
,当输入为单位阶跃时,则其位置误差为( )
·2
·0.2
·0.5
·0.05
若已知某串联校正装置的传递函数为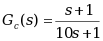 ,则它是一种( )
,则它是一种( )
·反馈校正
·相位超前校正
·相位滞后—超前校正
·相位滞后校正
稳态误差ess与误差信号E(s)的函数关系为( )
·
·
·
·
在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
·减小增益
·超前校正
·滞后校正
·滞后-超前
相位超前校正装置的奈氏曲线为( )
·圆
·上半圆
·下半圆
·45°弧线
开环传递函数为G(s)H(s)= ,则实轴上的根轨迹为( )
,则实轴上的根轨迹为( )
·(-3,∞)
·(0,∞)
·(-∞,-3)
·(-3,0)
在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
·电压
·电流
·位移
·速度
系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为( )
·最优控制
·系统辨识
·系统分析
·最优设计
·在额定动载荷作用下,轴承所能达到的寿命
·在额定工况和额定动载荷作用下,轴承所能达到的寿命
·在额定工况及额定动载荷作用下,90%轴承所能达到的寿命
·同一批轴承进行试验中,90%轴承所能达到的寿命
单选37 联轴器和离合器的主要作用是_____。
·联接两轴,使其一同旋转并传递转矩
·补偿两轴的综合位移
·防止机器发生过载
·缓和冲击和震动
单选38对于工作中载荷平稳,不发生相对位移,转速稳定且对中性好的两轴宜选用____联轴器。
·刚性凸缘
·滑块
·弹性套柱销
·齿轮
单选39 对于轴向径向位移较大,转速较低,无冲击的两轴间宜选用_____联轴器。
·弹性套柱销
·万向
·滑块
·径向簧片
单选40 轴环的用途是___。
·作为轴加工时的定位面
·提高轴的强度
·提高轴的刚度
·使轴上的零件获得轴向定位
某单位反馈系统的开环传递函数为:
,当k=( )时,闭环系统临界稳定。·10
·20
·30
·40
设系统的特征方程为
,则此系统中包含正实部特征的个数有( )·0
·1
·2
·3
单位反馈系统开环传递函数为
,当输入为单位阶跃时,则其位置误差为( )·2
·0.2
·0.5
·0.05
若已知某串联校正装置的传递函数为
,则它是一种( )·反馈校正
·相位超前校正
·相位滞后—超前校正
·相位滞后校正
稳态误差ess与误差信号E(s)的函数关系为( )
·
·
·
·
在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
·减小增益
·超前校正
·滞后校正
·滞后-超前
相位超前校正装置的奈氏曲线为( )
·圆
·上半圆
·下半圆
·45°弧线
开环传递函数为G(s)H(s)=
,则实轴上的根轨迹为( )·(-3,∞)
·(0,∞)
·(-∞,-3)
·(-3,0)
在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
·电压
·电流
·位移
·速度
系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为( )
·最优控制
·系统辨识
·系统分析
·最优设计